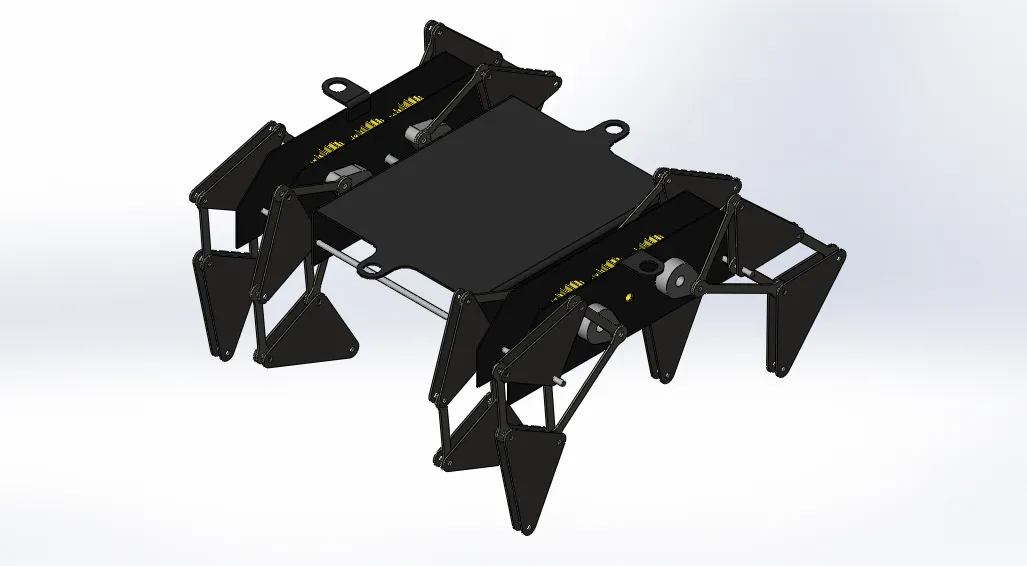
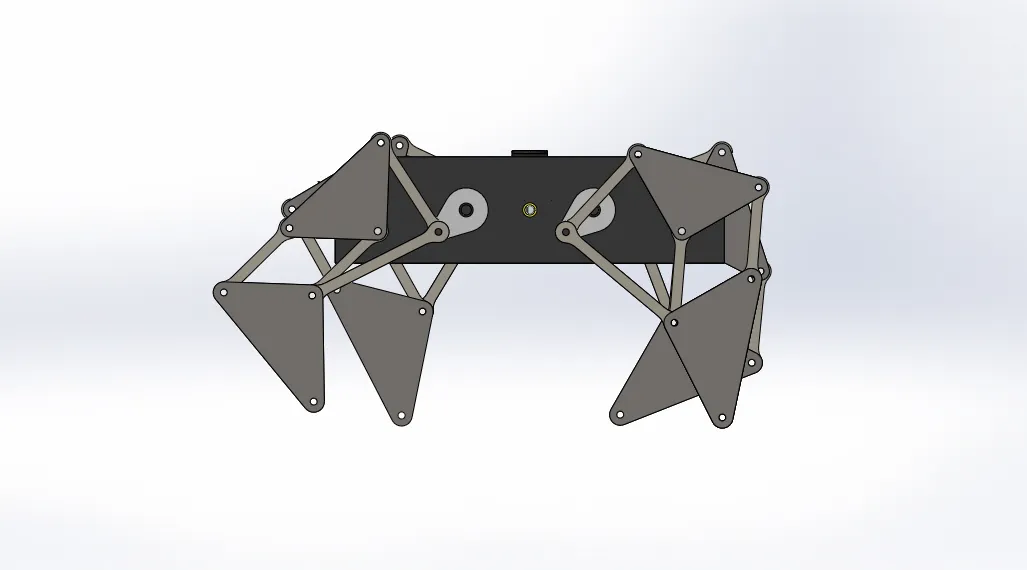
Legged Bot by Jensen Mechanism
Design a bot which overcomes torque of wheeled bots through walking motion, and efficient power. Spearheaded a team of 5 to develop a Bot which uses a single DC motor to power 8-legs replicating walking motion of Jensen Bots.
ID
01
Type
Electro-Mechanical Bot
Year
2022
Role
Team Lead
Design
Market Research
Literature Review
Stack
SolidWorks
AutoCAD
DC Stepper Motors
PCB
RF Module Remote
Design File
Final Project Report